Платформа предназначена для следующих работ:
- Движение по заданному маршруту по координатам GPS для перевозки грузов.
- Движение с полезным грузом в режиме следования за «хозяином».
- Транспортирование прицепа.
- Движение с грузом с дистанционным управлением через телеметрию в режиме FPV. Дальность управления радиопередатчика до 10 км по прямой видимости.
- Выполнение работ с помощью установленного на базу платформы манипулятора (роботизированная рука) и автоматическая погрузка грузов.
- Скашивание травы и мелкого кустарника.
- Установка кузова-самосвала.
Характеристики:
- грузоподъемность платформы до 150 кг;
- электроподъемник навесного оборудования до 60 кг;
- привод колес на электрической тяге от аккумуляторов;
- возможно применение электрогенератора;
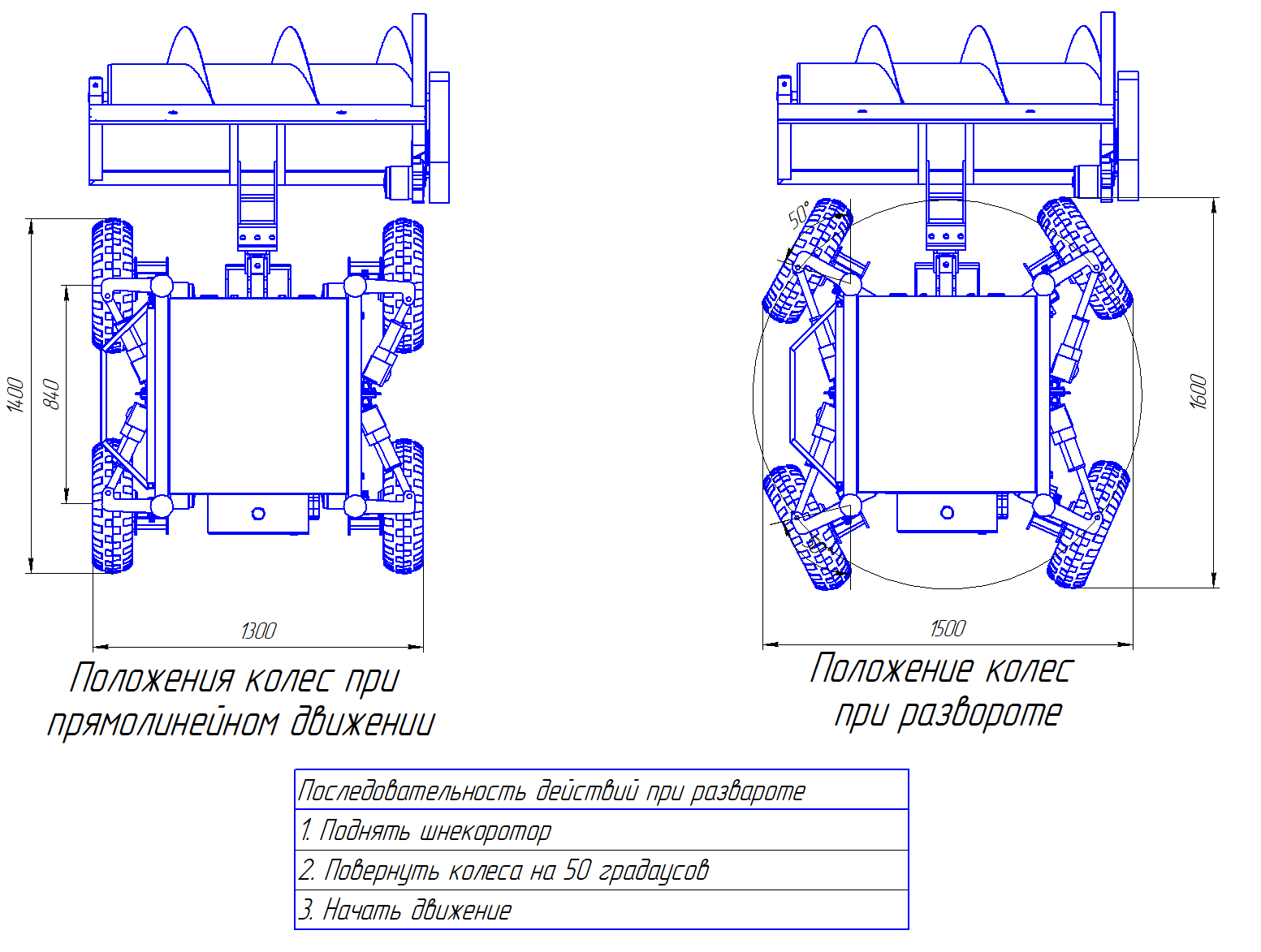
- имеет повышенную мобильность и экономию энергии при развороте за счет использования отдельных линейных электроприводов на каждое колесо;
- маршрут движения формируется на GPS-координатах, а также на данных, полученных после обработки видеоизображений с видеокамеры;
- возможен вариант движения за хозяином при управлении жестами.
Уровень технологической готовности: TRL 7. Демонстрация прототипа системы при условиях ее эксплуатации.
Правовая защита: свидетельство о ГР программы для ЭВМ № 2019615993 «Расчет траектории движения, позиционирование и удаленное управление движением агротехнического мобильного робота AgrYX».
Предложения по сотрудничеству: проектирование и изготовление мобильных роботизированных платформ по техническому заданию заказчика.